이전 글에서 실험에 사용하는 카메라의 고정을 쉽게 하기 위해 카메라 거치대를 직접 만든 적이 있었다. 아래 링크는 그 과정을 기록한 글이다.
만들기 : 3D 프린팅을 통한 카메라 거치대 제작
올해 처음으로 연구에 필요한 부품 제작을 의뢰받았다. 연구실 사수 형이 나에게 있으면 좋겠다고 한 부분인데, 어차피 나도 사용하는 장비에 필요한 부분이기 때문에 바로 제작에 들어갔다. 아
writing-engineer.tistory.com
위 글의 마지막 문단에서 앞으로의 정신적 고통을 감소시킬 것을 생각하면 카메라 거치대를 제작하는 데 소요된 2시간 30분 남짓은 투자할 가치가 충분하다는 내용의 글을 썼었는데, 이는 결과물을 오래 사용하지 않은 상태에서 할 수 있는 제작자의 자만이자 착각이었다. 사용 과정에서 불편한 요소들이 다시 발견되었기 때문이다. 돌아보면 그때 좀 더 시간 여유를 두고 예상되는 문제까지 확실하게 해결했어야 했다.
그 당시 가장 큰 문제는 카메라 앞에 부착하는 고배율 렌즈 때문에 무게중심이 앞으로 쏠리는 것이었다. 이로 인해 카메라 고정이 쉽지 않아 실험 준비 시간이 길어졌다. 카메라 거치대를 새로 만든 것은 이 문제를 해결했다는 점에서는 의미가 있었다.
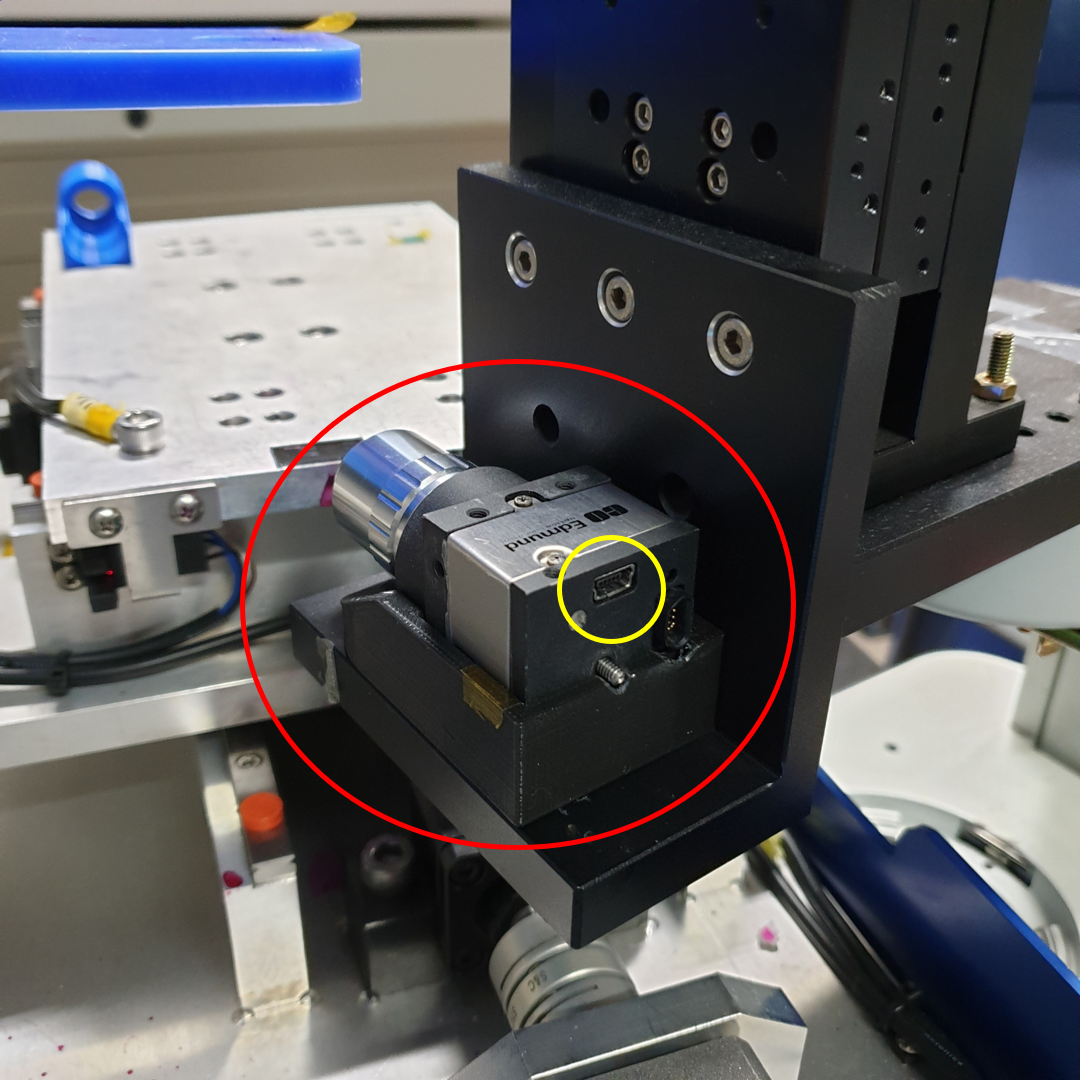
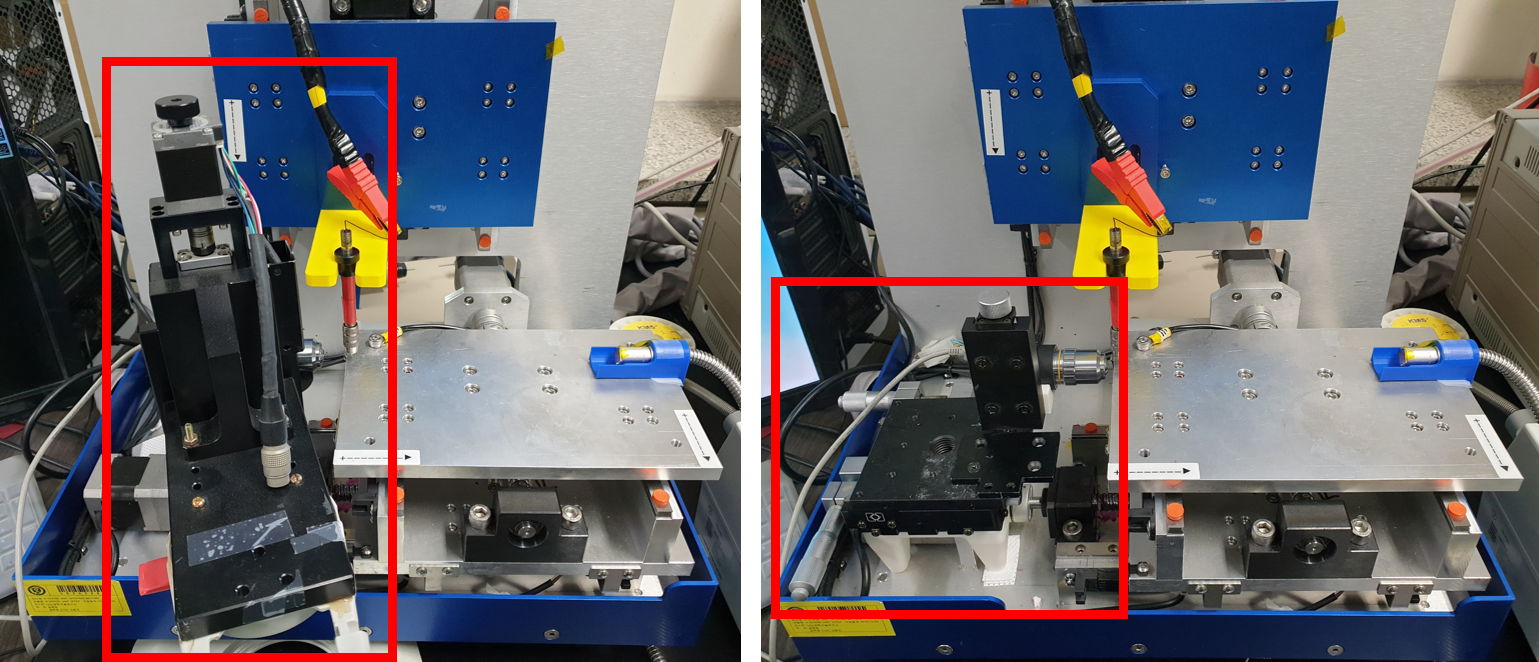
하지만 그 다음 문제에 대해서는 다소 안일하게 생각했다. 위 이미지에서 보듯 제작한 거치대로 인해 카메라가 기울어질 상황은 없어졌지만 그 상황에서 초점을 맞추는 과정은 결국 손으로 해야 한다는 문제가 남아 있었다. 추가적으로 카메라 거치대의 높이 조절용 장비가 너무 커서 실험 진행이 매우 불편했다. 주변의 공간 부족으로 내 앞에 둔 채로 실험을 진행해야 했기 때문이다.

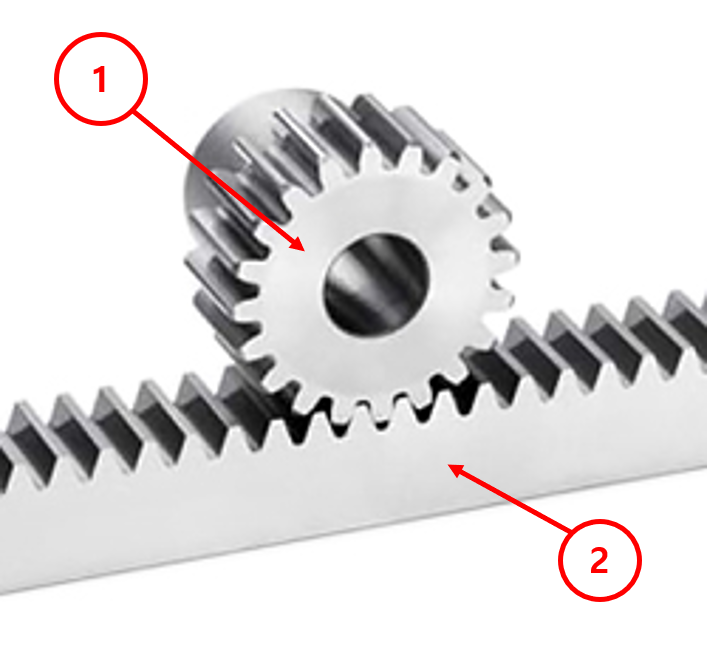
이런 문제 때문에 x-y-z 축으로 자유도를 고정시킨(대충 전후상하좌우로 움직일 수 있다는 뜻) 형태로 만드는 것도 생각을 했었다. 처음 떠올린 것은 랙-피니언 기어였는데 이를 직접 설계하고 만들기엔 시간이 너무 오래 걸릴 것 같았다. 3D 프린터로도 충분히 만들 수는 있지만 정밀도 및 내구성이 떨어질 것이 분명했다.
그런데 얼마 전 실험실 이사를 하면서 이 문제가 해결되었다. 이삿짐을 정리하는 과정에서 카메라의 x, y, z 축 방향 움직임이 가능하도록 조립할 수 있는 부품이 무더기로 발견되었기 때문이다.
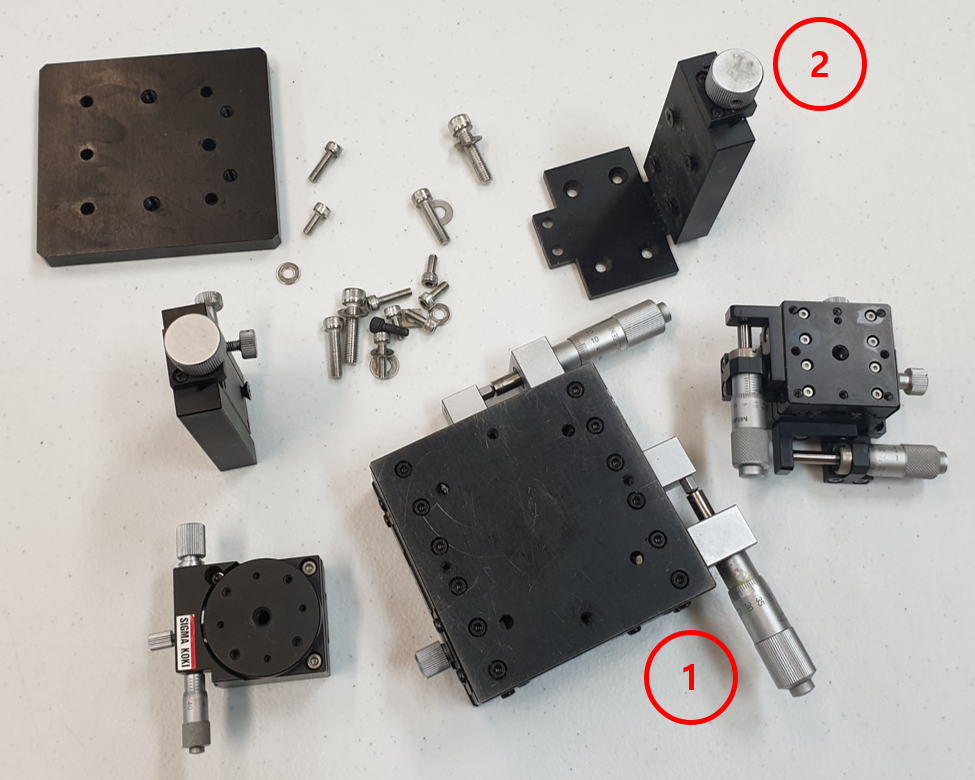
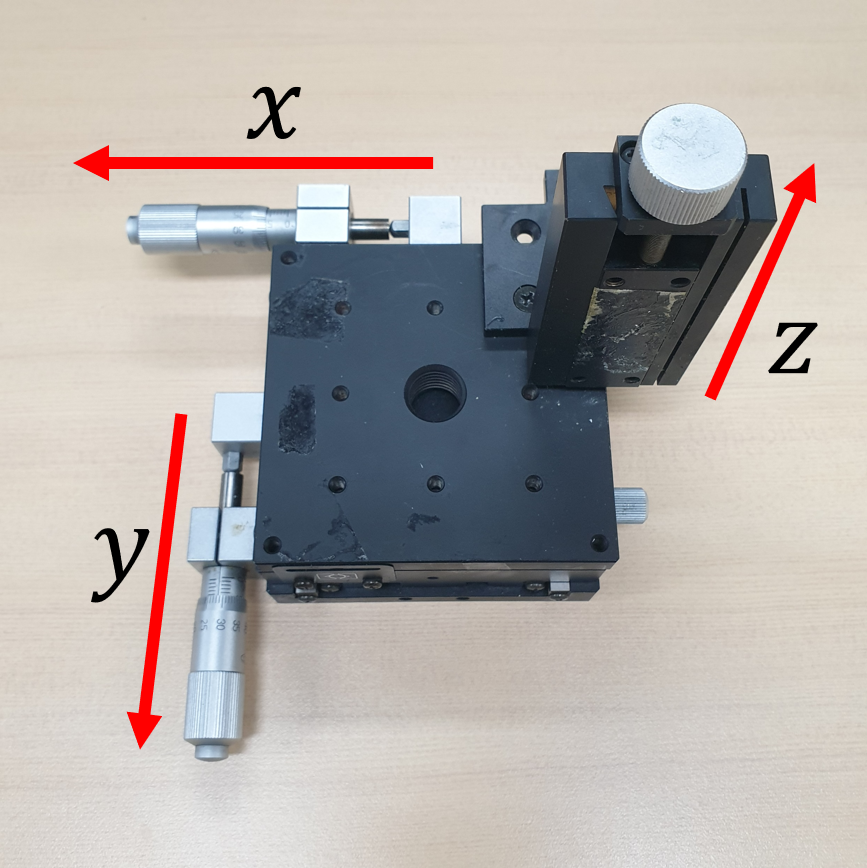
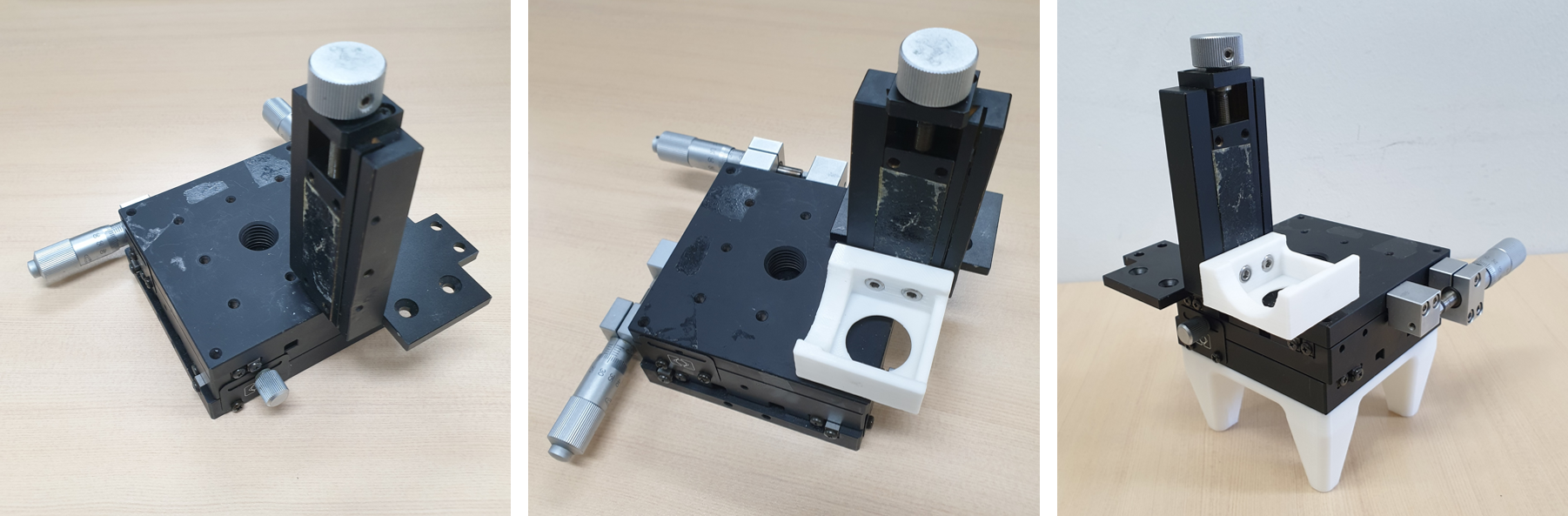
위 이미지에서 1, 2번 부품만 연결하면 공간좌표 3축을 모두 움직일 수 있기 때문에 정밀한 카메라 이동이 가능하다. 1번 부품을 통해 x, y축 방향 움직임이 가능하고, 이 위에 2번 부품을 올리면 z축 움직임도 가능하다. 아래 이미지와 같이 x-y-z 축 stage를 만들고 나니 덕분에 한동안 골칫거리였던 문제를 해결할 수 있을 것이라는 확신이 들었다. 바로 설계에 들어갔다.
제작 과정
위의 stage를 바로 사용하면 좋겠지만 실험 장비에 그대로 올려놓기엔 문제가 있다. 저 상태로는 카메라를 고정시킬 수 없고, stage 자체를 실험 장비에 그대로 올려두었을 때의 고정 문제가 남아 있었다. 이 문제들을 해결하기 위한 방법을 고민하기 시작했다.
치수 측정
우선 치수부터 측정하기로 했다. 이전 글에서도 언급했지만 기존 부품에 맞게 제품을 설계할 때는 치수 측정이 매우 중요하다. 아무리 잘 만들어도 연결하는 부위의 형태가 맞지 않거나 크기가 다르면 노력이 많이 들어간 쓰레기를 만든 것이나 다름없기 때문이다. 아래 이미지와 같이 (대충) 필요한 부분의 치수를 측정했다. 오른쪽이 실제 실험 장비이다.
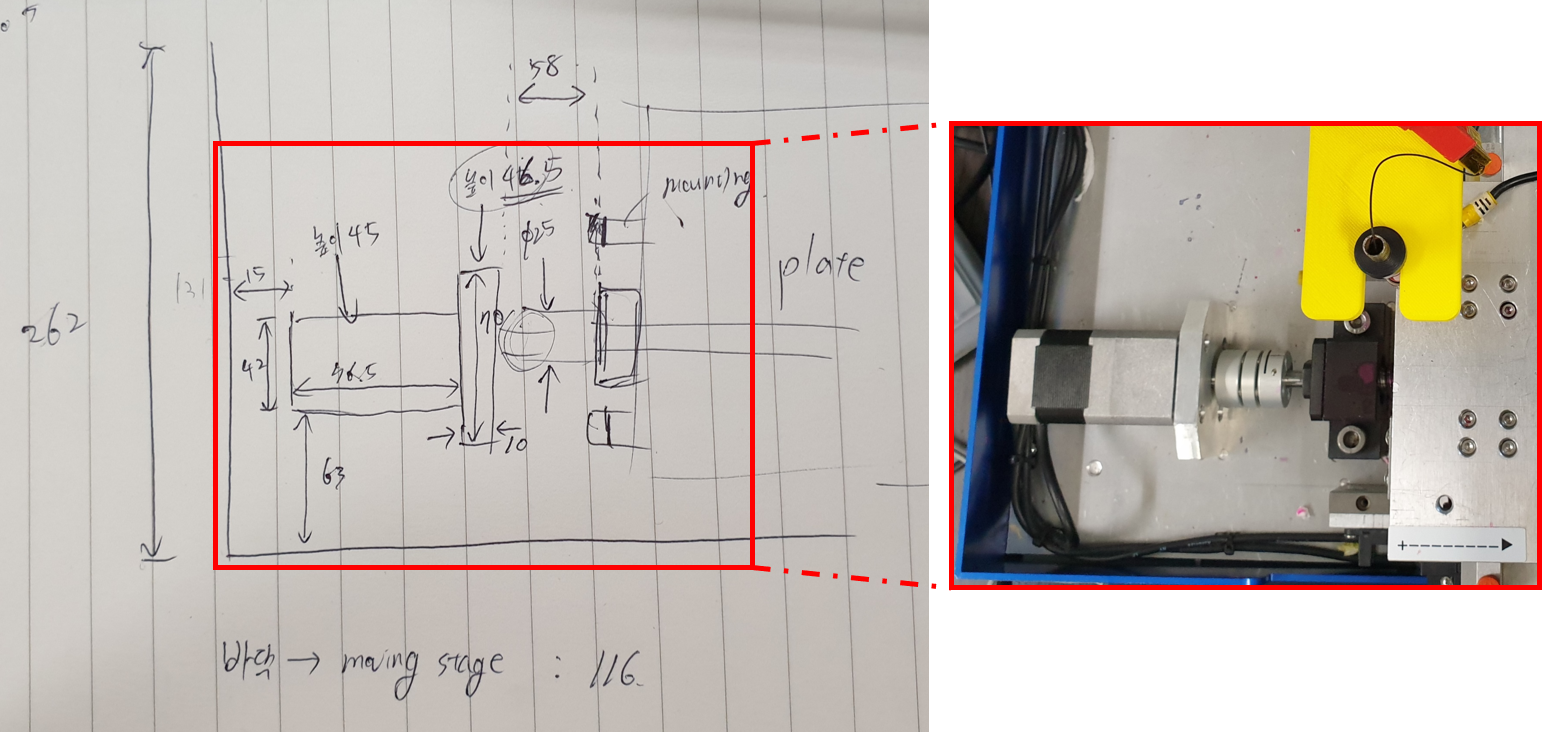
사실 필요한 부분이라고 해도 설계 과정에서 어떤 부분이 더 필요할지 아직 모르기 때문에 전체적으로 다 측정한 것과 크게 다를 바 없다. 버니어캘리퍼스를 사용해 정확하게 측정해야 하지만... 이번 경우는 0.5mm까지 눈금이 그어진 자를 가지고 측정했다. 그만큼 정확도가 떨어질 수밖에 없지만 시간을 더 지체하고 싶지 않았다.
조건 설정
측정한 치수에 맞게 부품을 만들 재료와 제작 방법에 대해 생각해 보았다. 뭔가를 만들 때는 이를 사용하게 될 환경에 대한 고려가 있어야 한다. 그 고려사항에 맞춰 재료와 제작 방법을 선택하게 된다.
가장 먼저 고려할 사항은 열이었다. 카메라를 오래 사용하면 열이 발생하기 때문에 고온에서 변형을 일으키지 않는 재료를 사용해야 한다. 다행인 것은, 카메라에서 발생하는 열은 손으로 들고 있을 때 따뜻한 정도이기 때문에 심각하게 고려할 사항은 아니다. 일반적으로 사용하는 나무, 플라스틱, 철 등의 특성을 고려했을 때 열 때문에 재료를 바꿔야 할 수준은 아니라는 뜻이다.
두 번째 고려사항은 전기와 관련된 부분이다. 실험에 kV 단위의 고전압이 사용된다. 고전압의 전류가 카메라로 통하게 된다면 망가지는 것은 물론 한동안 실험을 하기 어려울 것이다. 그렇게 되면 내 졸업이 위험해진다. 때문에 반드시 절연이 잘 되는 재료를 사용해야 한다. 예를 들면 플라스틱과 같은.
내열성이 있고 절연이 되는 재료를 선택했다면 실험 과정에서 중요한 것은 얼마나 카메라를 잘 고정시킬 수 있는가 하는 부분이다. 이전 글에서 제작했던 카메라 거치대가 카메라에 딱 맞게 설계되어 고정이 잘 된다는 것을 확인했기 때문에 움직임이 발생하는 문제는 없을 것이라 판단했다. 또한 x-y-z축 stage 자체가 공산품이 조립된 형태이고 그 무게도 육중하기 때문에 내가 부수적인 부품들을 구조적으로 설계만 잘한다면 고정에 있어서도 문제는 없을 것이라는 결론을 내렸다.
위 과정을 모두 거쳐 결정한 재료는 플라스틱, 더 정확히는 PLA였고 제작 방법은 3D 프린팅이었다. 사실 가장 먼저 3D 프린팅을 염두에 두고 위 과정을 거친 것이 현실이었다. 실질적으로 내가 사용할 수 있는 유일한 방법이기 때문이다.
손재주가 있는 편이기 때문에 재료로 나무를 선택하고 이를 직접 깎아 부품을 만드는 것도 충분히 가능하다. 하지만 이는 시간적인 측면에서 명백한 손해이다. 목공은 내 시간이 들어가야 하지만 3D 프린팅은 모델링이 끝나면 제작은 자동화가 되어 있는 과정이기 때문이다.
3D 모델링 & 3D 프린팅
정확도가 다소 떨어지는 감이 있지만 측정한 치수를 기반으로 모델링에 들어갔다. 프로그램은 역시 오토캐드를 사용했다. (다룰 수 있는 프로그램이 그것 뿐이다...) 2D 도면을 그리기 위해 사용하는 프로그램이라고 알고 있는 사람이 많은데 3D도 충분히 가능하다.
결합이 필요한 부위의 요철이 제대로 맞는지 등을 확인하기 위해 완성품을 프린팅 하기 전 테스트 프린팅을 한다. 자를 사용해 측정했기 때문에 상대적으로 덜 정확한 치수였지만 지금까지의 경험을 기반으로 테스트 프린팅을 무사히 통과했다. 어찌 보면 낭비라고 할 수 있지만 이 과정에서 문제를 발견하게 되면 제품 전체를 다시 만들어야 하는 상황을 방지할 수 있기 때문에 꽤나 중요한 과정이라고 생각한다.
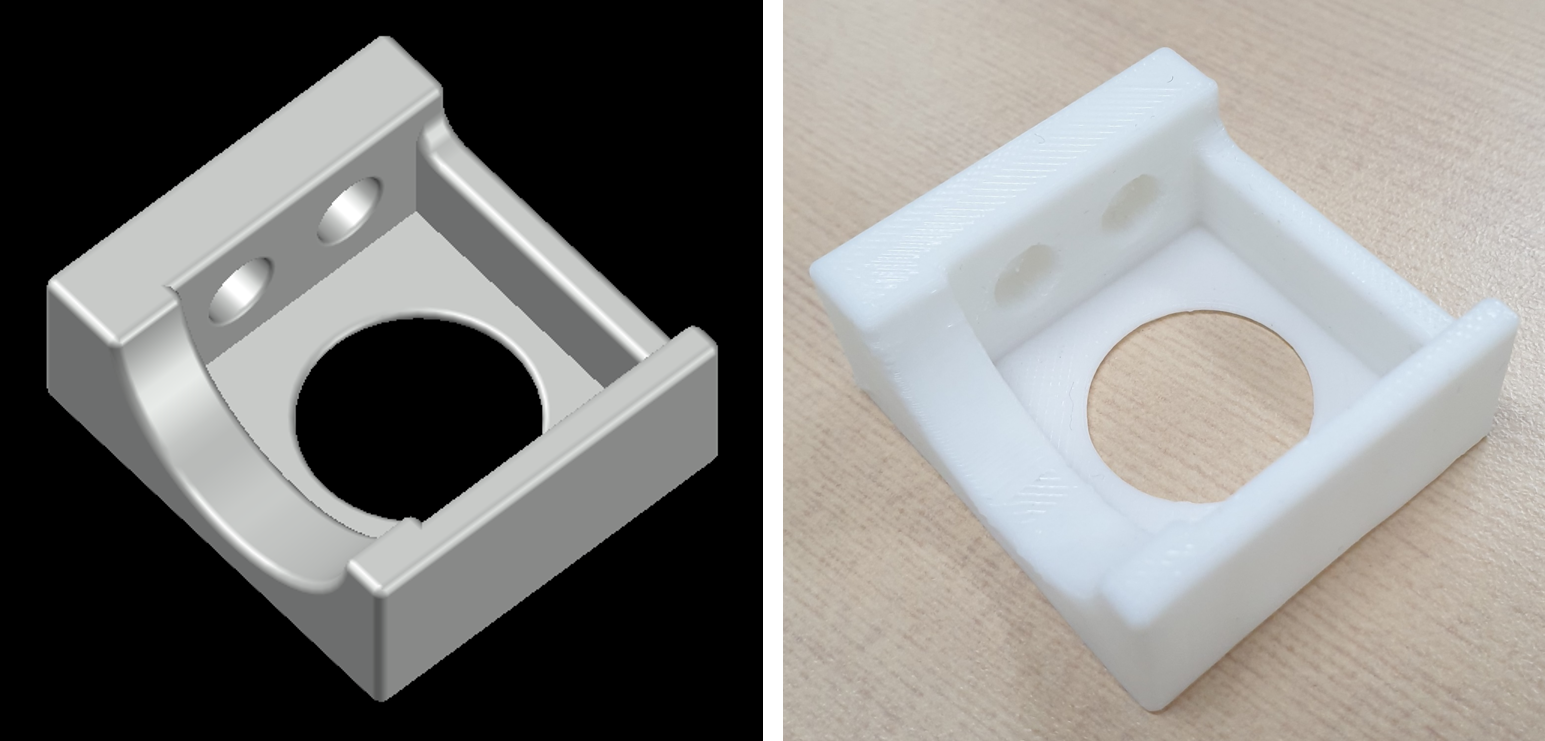
x-y-z 축 stage와 카메라를 연결시켜줄 부품은 기존 카메라 거치대를 변형해 쉽게 만들 수 있었다. 당시 문제가 있었던 부분을 수정할 수 있는 기회이기도 했다. 하단부를 설계하는 과정에서 앞서 측정한 치수들을 본격적으로 활용했다. 치수를 보며 구조적 제약 조건들을 피해 가며 설계하다 보니 다소 복잡한 형태가 되었다.
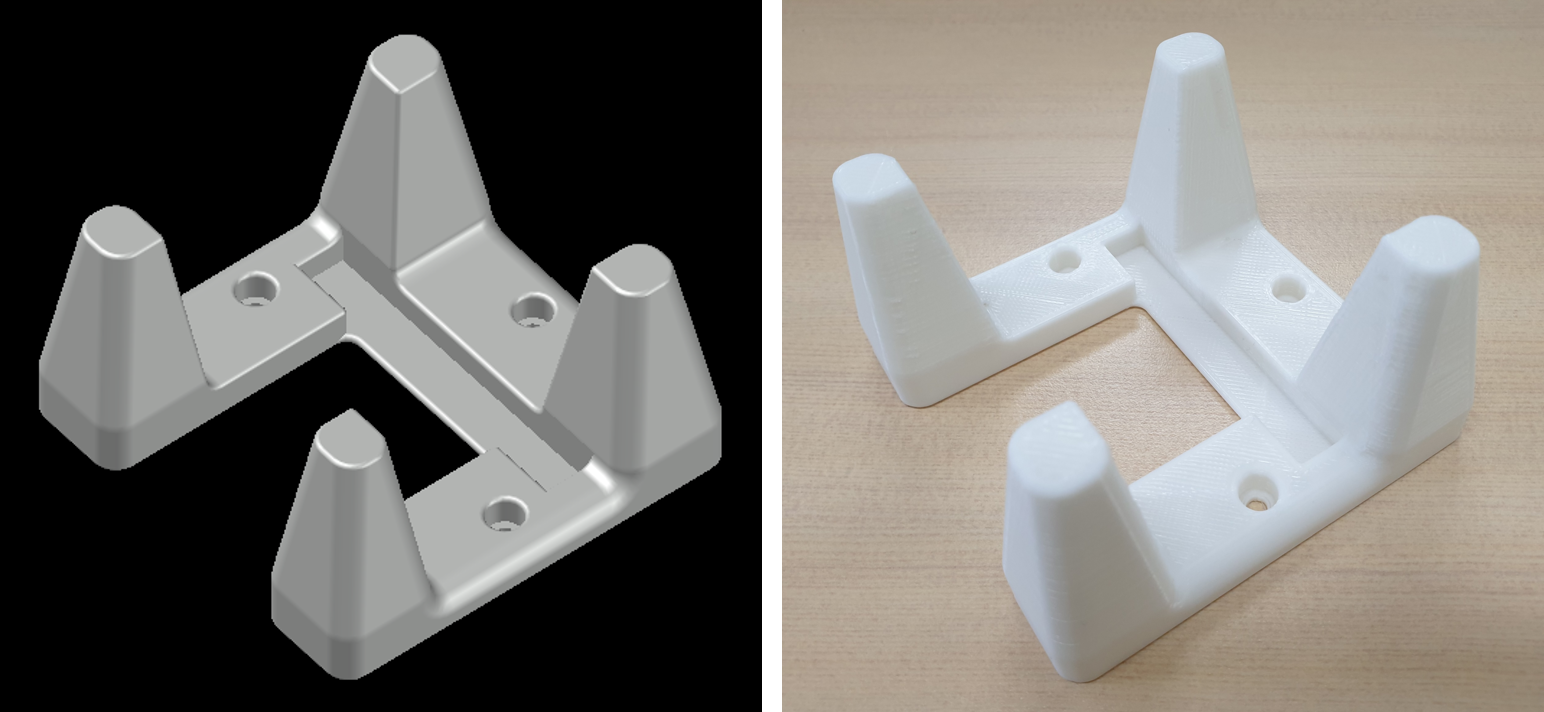
설계 과정에서 사용한 명령어들은 그리 많지 않다. C(circle), REC(rectangle), SLICE(slice), EXT(extrude), SUB(substract), INTERSECT(intersection) 등을 반복해서 사용하면 대부분 내가 원하는 기하학적 형상을 만드는 데 큰 무리가 없고, 이번 경우 사각 뿔대 형태의 다리 구조를 만들 때 LOFT를 사용한 것이 조금 심화였다. F(filet)을 사용해 테두리의 각진 부분들을 다듬는 것으로 마무리했다. 미관상 좋을 뿐만 아니라 3D 프린팅 결과물의 정밀도를 높여주는 효과가 있다.
결합 과정
나사 구멍의 위치는 물론 나사가 들어갈 수 있는 깊이까지 고려해 설계를 진행했고 중간중간 테스트 프린팅까지 거치면서 완벽하게 준비된 상태로 모델링을 마쳤기 때문에 프린팅 한 결과물들은 어디 하나 문제없이 정확하게 들어맞았다. 덕분에 최종적으로 사용할 새로운 거치대는 각 부품들을 조립하는 것만으로 쉽게 완성할 수 있었다. 설계의 중요성을 다시 한번 느끼는 순간이다.
사용 후기
실험 장비가 있는 곳에 가져가서 직접 설치해 보았다. 절로 웃음이 났다. 내가 기대한 모습 그대로 설치가 되었고 덕분에 저번 카메라 거치대만 만들었을 때와는 달리 걱정이 남는 부분이 없었기 때문이다. 아래 이미지를 보면 한눈에 봐도 실험 장비 앞 공간이 넓어진 것을 확인할 수 있다.
덕분에 실험 환경이 매우 쾌적해졌고 동선도 줄일 수 있었다. 실험 특성상 카메라 바로 앞부분에 실리콘 기판을 올렸다 뺐다 하는 일이 잦은데 기존의 육중한 거치대는 매우 거추장스러웠다. 하지만 이제 그런 방해물은 없어졌다. 실험 장비 바로 앞의 공간을 활용할 수 있다는 것이 제법 큰 장점이라는 생각이 든다. 지금까지는 그런 장점을 누리지 못한 것이다.
아래 이미지는 새로운 거치대를 완성한 뒤 처음 세팅을 끝내고 초점을 잡은 모습이다. 화면 왼쪽 상단을 보면 화면이 깨끗하게 잡힌 모습을 확인할 수 있다. 저렇게 선명하게 초점을 잡는 데까지 30초가 채 걸리지 않았다.
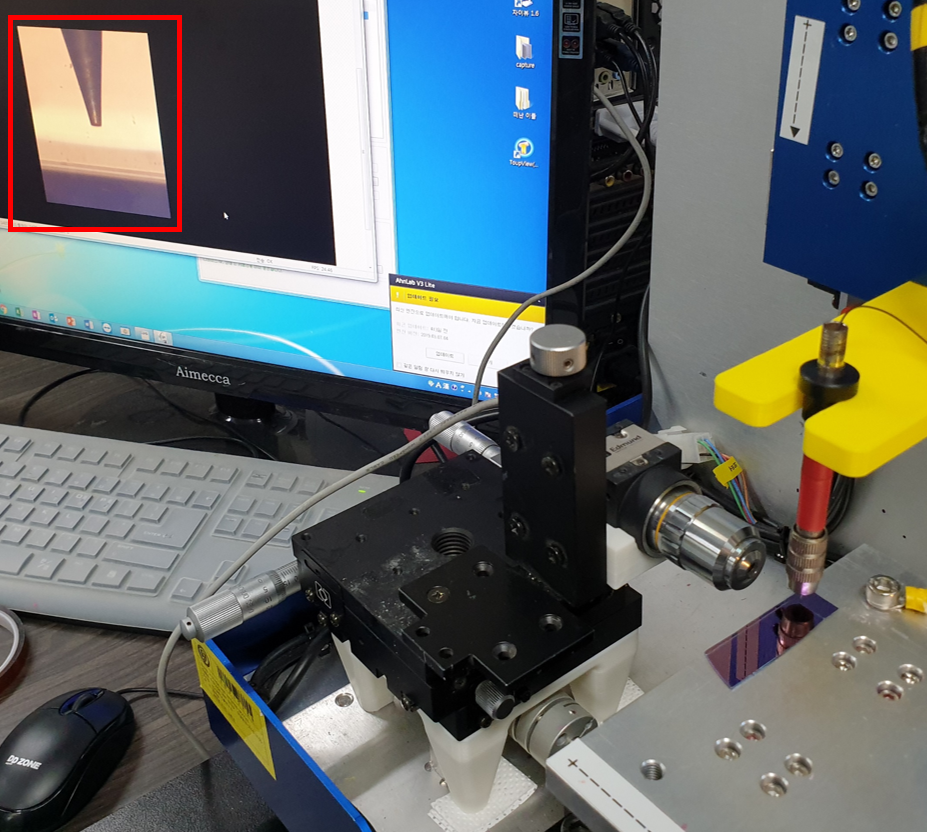
실제로 교수님께서도 새로운 거치대를 사용한 이후 초점이 잘 맞아 영상을 보기가 편하다는 말씀을 하셨다. 인턴 기간을 포함하면 이제 1년이 좀 넘는 넘는 시간 동안 연구실에 있었는데 그 기간을 통틀어 손꼽을 만큼 뿌듯한 순간이었다.
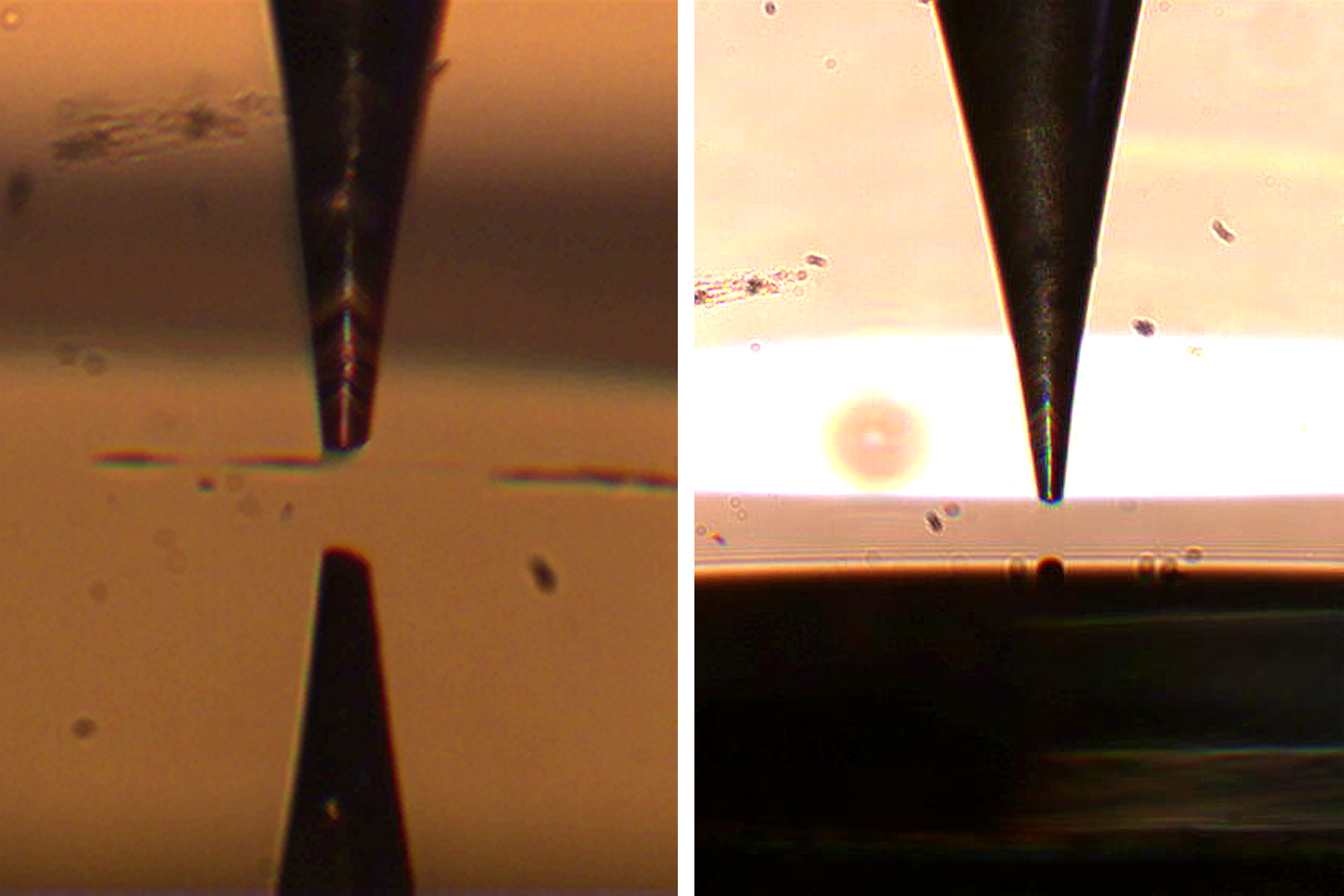
위의 이미지를 보면 빛의 세기나 각도의 문제가 있긴 하지만 새로운 거치대를 사용한 오른쪽 이미지의 형태가 전체적으로 더 뚜렷하게 잡혀 있다. 왼쪽은 양손으로 부들부들 떨면서 3분 이상 초점을 맞춘 결과지만 오른쪽은 컴퓨터 화면을 보며 한 손으로 30초 안에 완성한 모습이라는 점에서 그 의미가 크다.
직접 사용해 보면서 확신이 들었다. 새로운 거치대는 이 실험을 하는 과정에 있어서는 카메라가 바뀌는 등의 주변 환경 변화가 없다면 내가 졸업해도 쓸 수 있을 것이라는 것을.
실험에 방해되는 문제를 해결했으니 이제 다시 실험을 해야지...
'만드는 공대생 이야기' 카테고리의 다른 글
| 만들기 : 3D 프린팅을 통한 버킷(bucket) 거치대 만들기 (feat. 초원심분리기) (0) | 2020.07.18 |
|---|---|
| 만들기 : 3D 프린팅을 통한 모니터 부품 교체 (0) | 2020.06.17 |
| 만들기 : 무소음 마우스 개조 (6) | 2020.03.22 |
| 만들기 : 3D 프린팅을 통한 컵 홀더 제작 (0) | 2020.02.24 |
| 만들기 : 3D 프린팅을 통한 Conical tube 거치대 제작 (2) | 2020.01.25 |








최근댓글